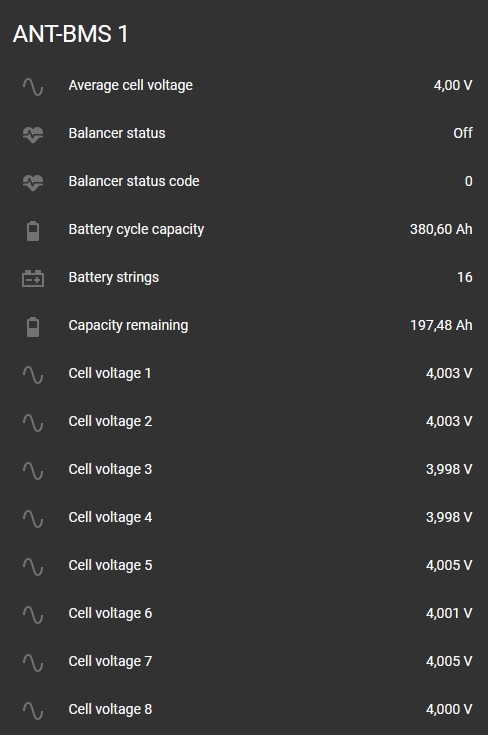
Sorry i miss somethink, battery cell data format is set to 1.
see only max and min cell in console, where i can see the rest 16 cells?
I ahve 3 batts each 16 cells itis too much datas but need disgnose some cell issue. thanks
how are you running the driver? If you run it manually you first need to disable serial-starter to not run on the port.
If it is only run through serial-starter it is either polling too fast (but 5sec is very slow so I don’t expect that) or you are not closing the serial port at the end of each poll.
It is possibly a compatibility problem. I did have to update it to the new firmware menus but it should still work with the old as well (you will have less firmware options available)
New version should be soon.
Hi @Jarek
The ANT should work. Make sure that is a TTL to USB converter.
Then you need to connect it here. Make sure your connection works well. Loose connections or wires do give the most issues.
Orange → TX on your converter
Green → RX on your converter
Red → Vcc (3.3V)
Black → Ground
Hi @Louisvdw
I think I connected everything correctly. The leads are soldered so there is no way that something will not connect. I attach photos. Do you have any idea where the problem was?
I checked everything again. I did a factory reset of Cerbo and reinstalled the driver. Unfortunately it doesn’t help.
Tell me if the answer to the command: “tail -f /data/log/serial-starter/current is correct”? Shouldn’t she only appear once?
root@einstein:~# tail -f /data/log/serial-starter/current
@400000006348590223e4aebc INFO: Start service vedirect-interface.ttyUSB0 once
@40000000634859072fbff5fc INFO: Start service dbus-serialbattery.ttyUSB0 once
@4000000063485913055ba2ac INFO: Start service gps-dbus.ttyUSB0 once
@400000006348591c138513f4 INFO: Start service vedirect-interface.ttyUSB0 once
@40000000634859211f80f6dc INFO: Start service dbus-serialbattery.ttyUSB0 once
@400000006348592c2ede0df4 INFO: Start service gps-dbus.ttyUSB0 once
@400000006348593601b5d7e4 INFO: Start service vedirect-interface.ttyUSB0 once
@400000006348593b0ee823a4 INFO: Start service dbus-serialbattery.ttyUSB0 once
@400000006348594621a1e6c4 INFO: Start service gps-dbus.ttyUSB0 once
@400000006348594f2f813f4c INFO: Start service vedirect-interface.ttyUSB0 once
@400000006348595500041cbc INFO: Start service dbus-serialbattery.ttyUSB0 once
@400000006348596010afef3c INFO: Start service gps-dbus.ttyUSB0 once
@40000000634859691ffdaca4 INFO: Start service vedirect-interface.ttyUSB0 once
@400000006348596e2bc1fcfc INFO: Start service dbus-serialbattery.ttyUSB0 once
@40000000634859793b836f7c INFO: Start service gps-dbus.ttyUSB0 once
@40000000634859830ef70c0c INFO: Start service vedirect-interface.ttyUSB0 once
@40000000634859881ab84754 INFO: Start service dbus-serialbattery.ttyUSB0 once
I changed the adapter to FTDI but it still didn’t help. Browsing through messages from @Gman and @picard, I came to the conclusion that they have the old ANT BMS (before 2021) and I have a new one from 2022. I found information on the Internet that from 2021 ANT BMS have a new protocol.
Don’t you think this could be the cause of my problems?
@40000000634b3976286ce274 INFO:SerialBattery:Testing Ant
@40000000634b397639ca26bc ERROR:SerialBattery:>>> ERROR: No reply - returning
@40000000634b39763a0b8134 ERROR:SerialBattery:>>> ERROR: Incorrect Data
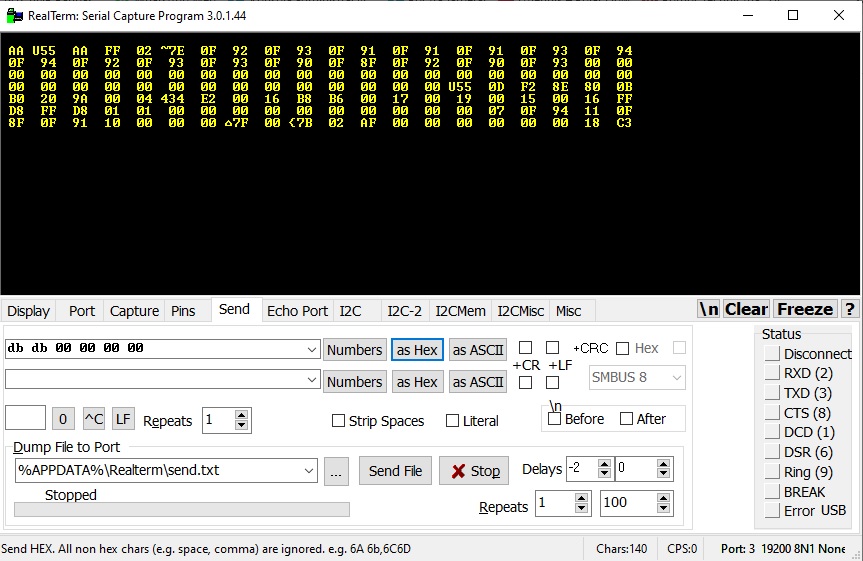
As I really care about the ANT BMS integration, I try to look for a solution. I have established that the new ANTs (2021 and beyond) communicate using the old and new protocols. Today I connected ANT to my PC using a USB-UART adapter and in RealTerm I checked how ANT responds to the sent data. I sent “db db 00 00 00 00” to BMS and I received 140 bits of data.
This is proof that everything is fine with BMS, adapter etc. And the problem is probably in the driver. Are you able to help me further diagnose the driver and move the communication?
by the way, I was sending commands to the BMS in accordance with the new protocol - BMS receives them and processes them correctly. If in the future you decide to implement it in your driver, it will be possible to control all BMS parameters from the Venus OS level. For example, turning on and off the BMS, charging, discharging, balancing, bluetooth and much more.
The new beta release of the V3.0 GX firmware has some intresting changes in.
You can now have this
For systems having multiple BMSes connected, allow selecting which one should be used for DVCC. It also allows the use of a BMV for SOC tracking – by selecting BMV as battery monitor – while still using the BMS for DVCC.